16H – Recycleur de capsule à café
Par admin le jeudi, février 9 2017, 12:00 - 2016-2017 - Lien permanent
Ce projet a été réalisé par Noah Ajani.
1. Introduction
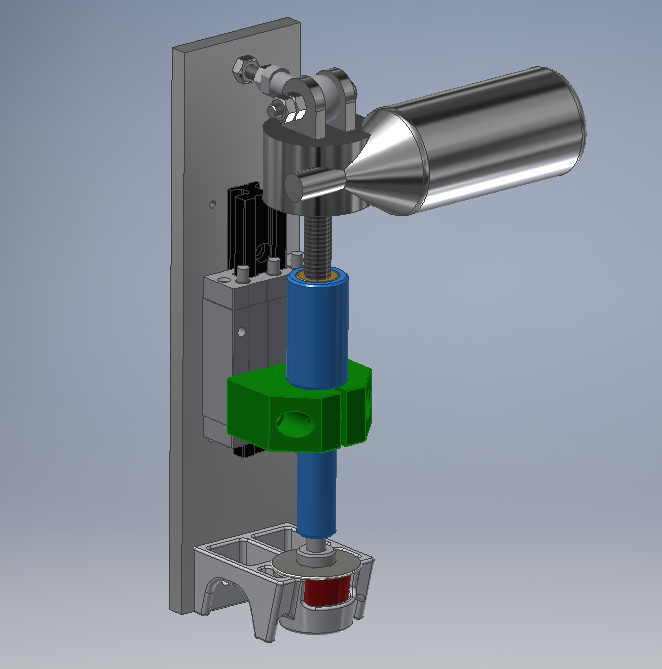
Le recyclage devient une question préoccupante pour le monde entier depuis quelques années. Jusqu'aux plus petits objets nous nous devons de soigner cette planète qui est déjà très malade. Ce projet est un recycleur de capsule de café. Le but est de pouvoir déchirer la feuille en aluminium de la capsule pour pouvoir en extraire le marc de café pour le jeter au composte et recycler le reste de la capsule fait en aluminium. Le tout fonctionne grâce à un moteur qui fait tourner une vis qui vient percer la feuille en aluminium.
2. Matériel et méthodes
Le matériel nécessaire à la réalisation de ce projet est:
- un moteur 12V à transmission avec une tige
- un écrou pour retenir la vis (généralement vendu ou conseillé sur le site d'achat du moteur)
- un rail muni d'un chariot accroché à lui
- une plaque pour fixer le tout
- une fraise à 90°
- Pi raspberry 3
- une Breadboard
- Arduino 4N35 12V relay
- 4N35 optoisolator
- LCD (pas nécessaire)
- Pulse Width Modulation (pas nécessaire)
- une alimentation 12V
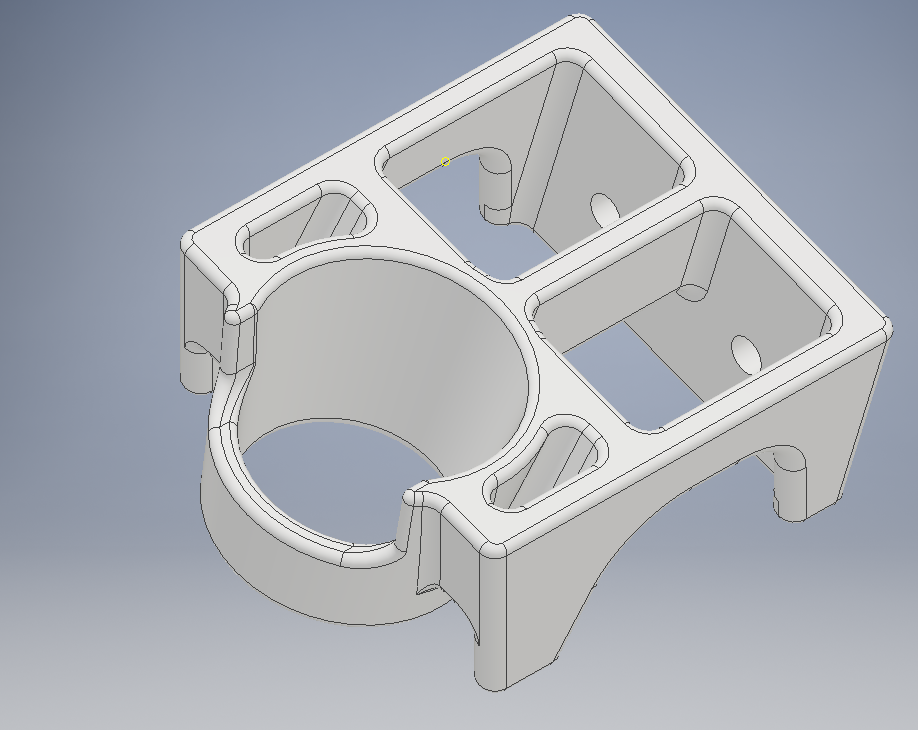
- une pièce à faire sur mesure à l'imprimante 3D pour tenir la capsule
2.1. Méthodes
Il faut savoir que j'ai été aidé par un professionnel de la mécanique pour mettre ce projet sur pied. Il m'a aidé pour les plans et pour la modélisation de la pièce à imprimer. Il faut d'abord construire l'objet à l'aide des différentes pièces.
Puis branchez les câbles allant du moteur jusqu'à la bread board du pi raspberry et connectez le Arduino et les câbles
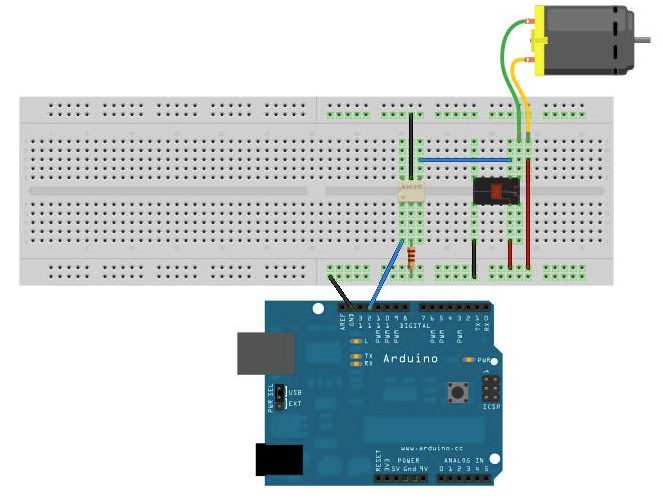
Mais contrairement au schéma, il faut égalment brancher l'alimentation 12V comme sur

pour pouvoir tirer la puissance maximal du moteur si l'envie vous prend. Mais il faut savoir que le voltage donné au moteur définit la vitesse à laquelle il va tourner. Lui donner du 12V va le faire tourner au maximum et plus on descend le voltage, plus il va tourner lentement. Je n'ai malheureusement pas pu faire la programmation exact pour ce projet à cause de la raison que j'aborde dans le paragraphe Résultats. Mais pour faire marcher le moteur, il faut utiliser la commande HIGH (qui le fait aller dans le sens des aiguilles d'une montre et qui fait donc descendre la visse) ou la commande LOW (qui fait tourner le moteur dans le sens contraire des aiguilles d'une montre et qui fait remonter la visse).
Il y a aussi une autre méthode, plus compliquée mais plus intéressante, pour la programmation de ce moteur et pour régler sa vitesse. Cette méthode consiste à utiliser l'écran LCD et le Pulse Width Modulation. En connectant les différentes parties (voir annexe TIP122 LDR 12V Fan_bb.jpg), on peut contrôler la vitesse du moteur en fonction de la lumière que reçoit l'écran. Il faudrait garder la même ligne de code que dans la première méthode proposée et rajouter ceci:
int ldr = 0;
ldr = analogRead(0)/4;
// if light level is room light, turn the fan speed higher
if ( ldr < 125 && ldr > 40 ) {
ldr = ldr + 50;
}
// if value is less than 40, do not switch the fan ON
if ( ldr < 40 ) {
ldr = 0;
}
// else run the fan speed according to light level up to 255
// send PWM value to TIP-122 base pin
analogWrite(9,ldr);
delay(500);
Cette technique est certes plus amusantes, mais demande plus de pièces pour la faire fonctionner, et est peut être moins pratique car si la lumière est trop forte, le moteur pourrait s'emballer et quand on sait qu'il peut tirer jusqu'à du 22 ampères, on préfère ne pas être à côté en géréral (sauf si vous n'avez pas peur de finir grillé)
3. Résultats
Suite à un problème de livraison et parce que je m'y suis mis un peu trop tard aussi, je n'ai malheureusement pas pu finir ce projet qui était sûrement trop ambitieux pour ce rendu de projet qui est le premier de l'année. Mais maintenant que j'ai appris de mes erreurs, je vais pouvoir m'organiser beaucoup plus efficacement et ne pas répéter mes erreurs pour le projet que l'on va devoir réaliser pour cet été.
4. Discussion
L'idée de départ était un écraseur de bouteille qui pouvait détécter quand on posait une bouteille dans l'orifice prévu grâce au poids et qui, à l'aide d'un moteur, abaissait un levier qui venait écraser la bouteille en PET voulue. Malheureusement, les forces en jeux sont énormes et la partie mécanique était trop dur à réaliser. Pour faire simple, la force nécessaire pour écraser une bouteille en PET est de environ 200 Newton (calculable facilement en posant une bouteille sur une balance et en regardant le poids nécessaire pour l'écraser et le multiplier par 10). Le système que j'avais prévu était un levier qui venait écraser la bouteille avec le moteur à son extrémité pour faire monter ou descendre le levier. J'avais choisis un rapport 5:1 entre la bouteille et le moteur (c'est-à-dire que le moteur est 5 fois plus loin que la bouteille par rapport à l'axe du levier) et comme vous le savez sûrement, plus on met de force loin de où on veut en mettre, plus la force sera multipliée. Donc avec ce rapport 5:1, la force de 200 Newton a pressé sur la bouteille se retrouvait à être une force de 40 Newton pour le moteur (200/5=40).
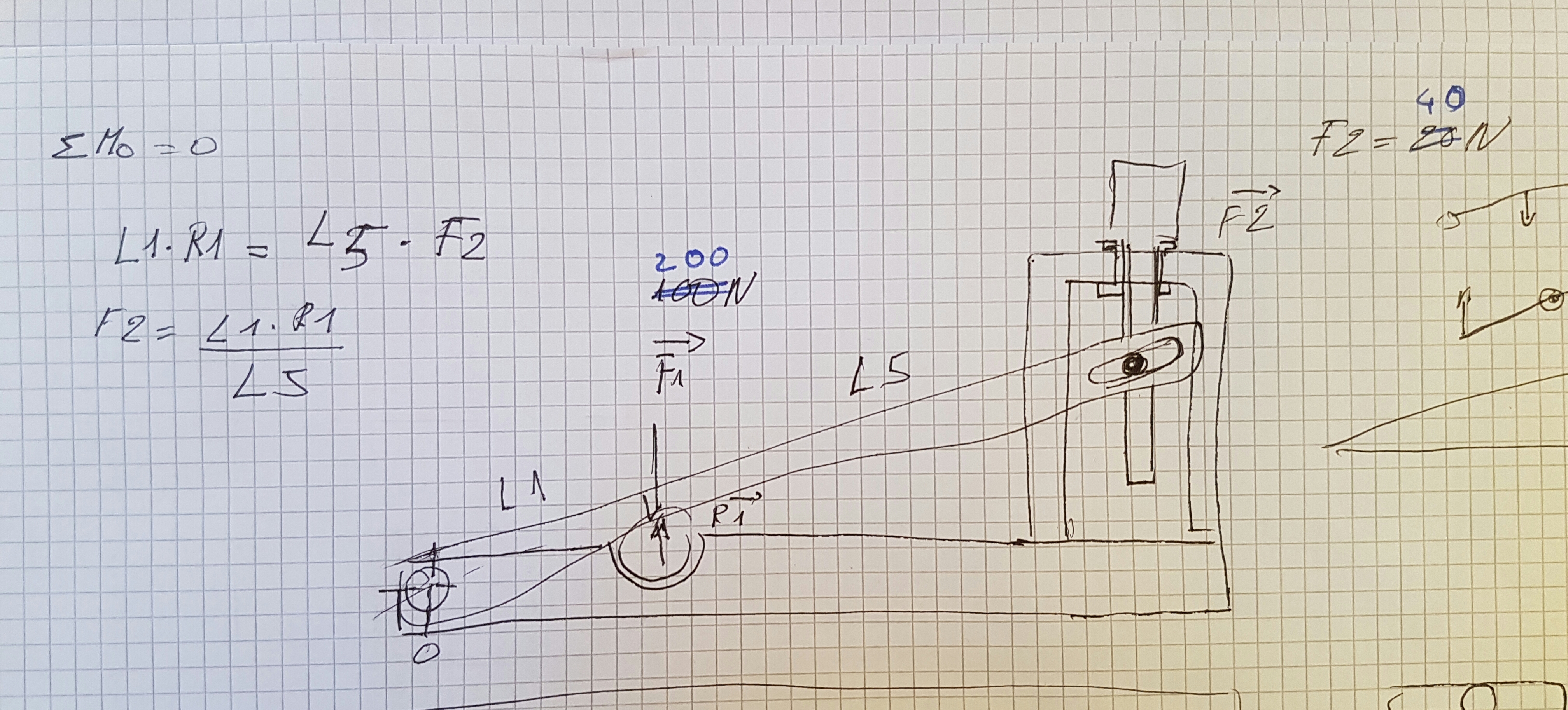
Mais même à 40 Newton, le moteur recquiert une puissance vraiment grande et le prix de moteurs avec cette capacité dépasse bien souvent les 200 francs. Sans compter toute l'armature pour le levier et les chariots nécessaires pour que le levier puisse descendre et remonter sans partir de travers. Le réel problème n'était pas la faisabilité, mais plutôt le coup total du hardware, qui me serait revenu à plus de 600 francs. J'ai dû donc rechercher un nouveau projet et c'est là que j'en suis arrivé au recycleur de capsule à café. L'idée de base reste la même, mais au lieu de presser une bouteille, un moteur fait descendre à l'aide d'une vis une fraise qui vient percer la feuille en aluminium de la capsule, avec ce même mouvement de presse que sur le projet initial. Les forces en jeux sont pour le coup bien moindre (10 Newton seulement pour percer la feuille en aluminium de la capsule), ce qui rend le projet plus facile mécaniquement parlant.
Même si ce projet voit le jour, je serai tout de même déçu de ne pas pouvoir avoir accompli l'écraseur de bouteille que je voulais faire de base. Même si mécaniqement, c'était très ambitieux et très compliqué, la partie programmation relevait un joli défi. Malheureusement, en ayant simplifié la partie mécanique du projet, la partie programmation s'est aussi énormement simplifiée ausi, ce qui me donne l'impression que j'ai réalisé un projet plus sur le plan mécanique que informatique.
5. Conclusion
Comme dit précédemment, je n'ai pas pu finir ce projet. Il était clair que c'était beaucoup trop ambitieux, que les forces et la mécanique en jeux étaient bien trop présentes dans ce projet qui devait être purement de l'informatique. Et malgré les avertissements de mon professeur, je suis partit tête baissée droit dans un mur bien trop solide à percer. Je le regrette beaucoup maintenant et c'est dommage aussi pour ce projet qui aurait pu être génial à jouer avec et à programmer. Mais grâce à ces erreurs, je saurais que maintenant il faut que je me concentre d'avantage sur la partie informatique et non sur l'objet en lui-même, car je suis jugé sur la programmation et non sur le hardware.